Robust Initialization of VINS
T. Qin and S. Shen, “Robust initialization of monocular visual-inertial estimation on aerial robots,” in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC: IEEE, Sep. 2017, pp. 4225–4232. doi: 10.1109/IROS.2017.8206284.
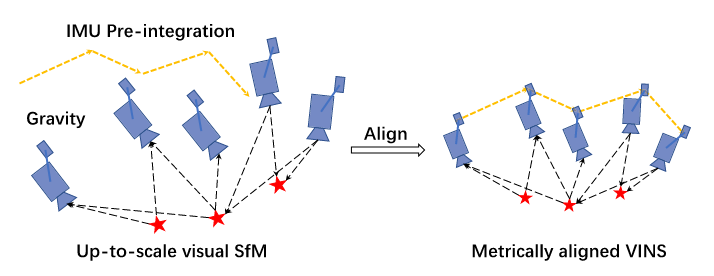
这篇文章提出了一种鲁棒的视觉惯性系统初始化方法,通过松耦合的方式对齐 IMU 与视觉数据,主要解决了外参数标定、陀螺仪偏置估计、速度重力尺度和视觉惯性对齐等关键问题。