Derivation of On-Manifold IMU Preintegration
- C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-Manifold Preintegration for Real-Time Visual--Inertial Odometry,” IEEE Trans. Robot., vol. 33, no. 1, pp. 1–21, Feb. 2017, doi: 10.1109/TRO.2016.2597321.
- Z. Yang and S. Shen, “Monocular Visual–Inertial State Estimation With Online Initialization and Camera–IMU Extrinsic Calibration,” IEEE Trans. Automat. Sci. Eng., vol. 14, no. 1, pp. 39–51, Jan. 2017, doi: 10.1109/TASE.2016.2550621.
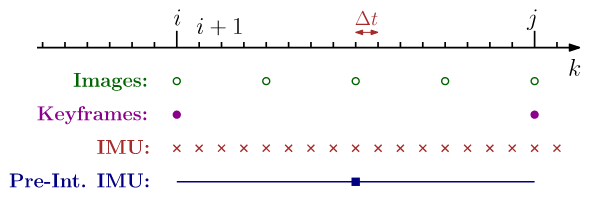
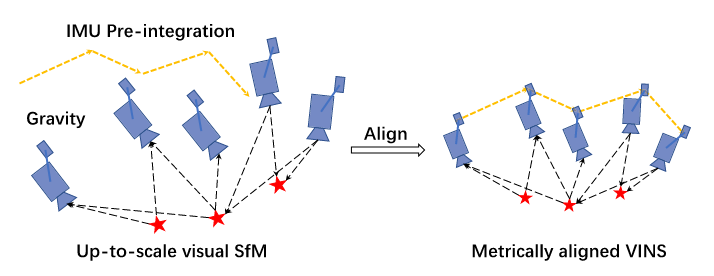
IMU preintegration is a technique in visual-inertial odometry that efficiently fuses high-frequency IMU data between keyframes. Using Lie group theory on \(SE(3)\), it handles nonlinear 3D rotations and precomputes motion constraints for optimization. This method accounts for sensor biases, noise, and is essential for real-time state estimation.