Slide: Explore reinforcement learning (RL) by comparing the Markov Chain and the Markov Decision Process (MDP). Understand how RL functions as a direct adaptive optimal control method through the example of Q-Learning. Inspired by Sutton's paper "Reinforcement Learning is Direct Adaptive Optimal Control" and Pieter Abbeel's lecture "Foundations of Deep RL".
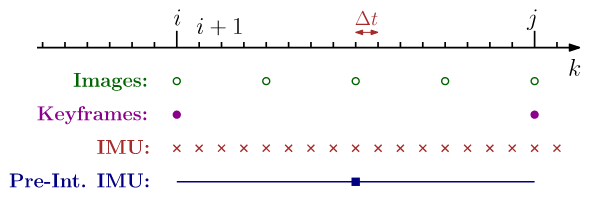
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-Manifold Preintegration for Real-Time Visual--Inertial Odometry,” IEEE Trans. Robot., vol. 33, no. 1, pp. 1–21, Feb. 2017, doi: 10.1109/TRO.2016.2597321.
Z. Yang and S. Shen, “Monocular Visual–Inertial State Estimation With Online Initialization and Camera–IMU Extrinsic Calibration,” IEEE Trans. Automat. Sci. Eng., vol. 14, no. 1, pp. 39–51, Jan. 2017, doi: 10.1109/TASE.2016.2550621.
IMU preintegration is a technique in visual-inertial odometry that efficiently fuses high-frequency IMU data between keyframes. Using Lie group theory on \(SE(3)\), it handles nonlinear 3D rotations and precomputes motion constraints for optimization. This method accounts for sensor biases, noise, and is essential for real-time state estimation.
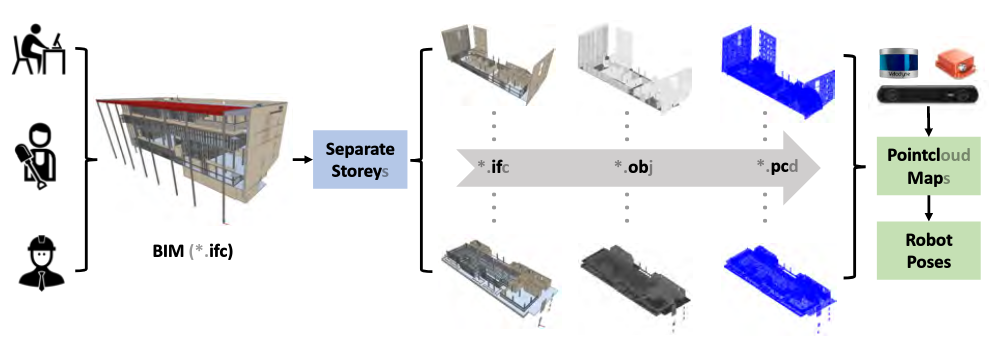
H. Yin, J. M. Liew, W. L. Lee, M. H. Ang, Ker-Wei Yeoh, and Justin, “Towards BIM-based robot localization: a real-world case study,” presented at the 39th International Symposium on Automation and Robotics in Construction, Jul. 2022. doi: 10.22260/ISARC2022/0012.
H. Yin, Z. Lin, and J. K. W. Yeoh, “Semantic localization on BIM-generated maps using a 3D LiDAR sensor,” Automation in Construction, vol. 146, p. 104641, Feb. 2023, doi: 10.1016/j.autcon.2022.104641.
Z. Qiao et al., “Speak the Same Language: Global LiDAR Registration on BIM Using Pose Hough Transform,” IEEE Transactions on Automation Science and Engineering, pp. 1–1, 2025, doi: 10.1109/TASE.2025.3549176.
In traditional SLAM, mapping and localization occur simultaneously, with maps built incrementally. In construction, maps are created once to support long-term operations, and BIM is increasingly favored over CAD. The following studies explore BIM-based localization, semantic consistency, and geometric consistency.
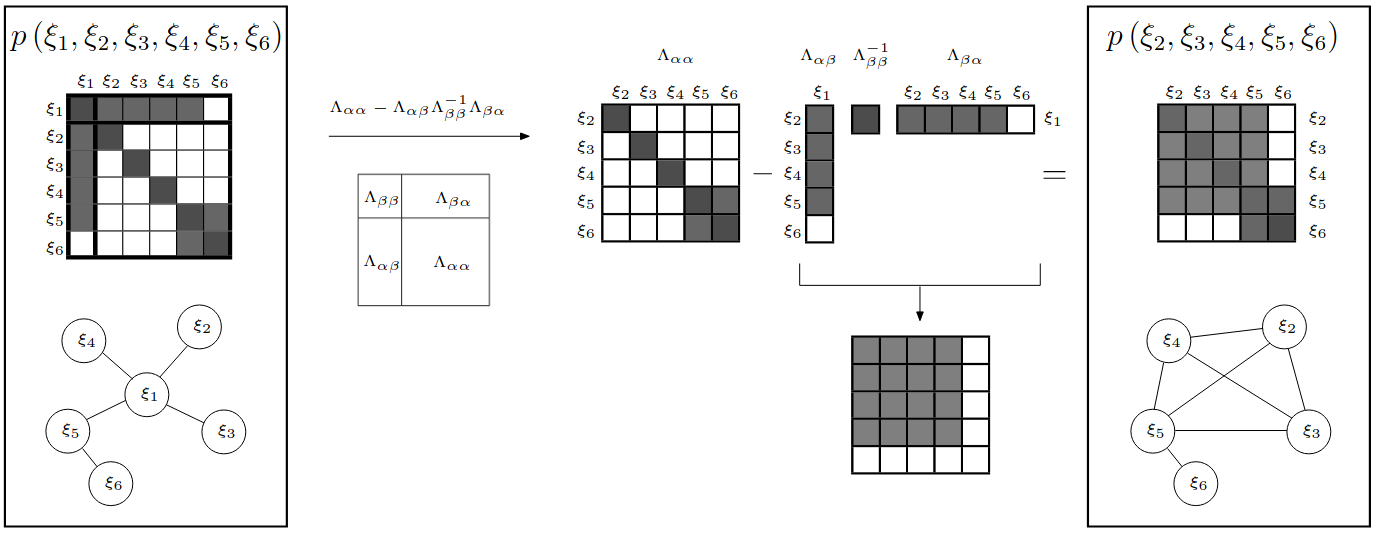
M. R. Walter, R. M. Eustice, and J. J. Leonard, “Exactly Sparse Extended Information Filters for Feature-based SLAM,” The International Journal of Robotics Research, vol. 26, no. 4, pp. 335–359, Apr. 2007, doi: 10.1177/0278364906075026.
This is the lecture notes for 'ELEC 5650: Networked Sensing, Estimation and Control' in the 2024-25 Spring semester, delivered by Prof. Ling Shi at HKUST. In this session, we will cover Linear Quadratic Regulator (LQR) theory and its applications in control systems.
This is the lecture notes for "ELEC 5650: Networked Sensing, Estimation and Control" in the 2024-25 Spring semester, delivered by Prof. Ling Shi at HKUST. In this session, we will deviate Kalman Filter from three different perspectives: Geometric, Probabilistic, and Optimization approaches.
This is the lecture notes for "ELEC 5650: Networked Sensing, Estimation and Control" in the 2024-25 Spring semester, delivered by Prof. Ling Shi at HKUST. In this session, we will explore maximum a posteriori (MAP) estimation, minimum mean squared error (MMSE) estimation, maximum likelihood (ML) estimation, weighted least squares estimation, and linear minimum mean square error (LMMSE) estimation.